ロボットビジョンシステム
視覚情報を用いて自律的に動作させることができます。
今までロボット搬送が難しいと思われてきた箇所にも知能化が可能になってきました。
また周辺装置の削減、省力化、長時間自動運転など生産現場には欠かせないアイテムです。
2.5次元位置補正取出し

平面上にあるワークの位置を検出します。 また平面上であれば高さ方向の位置検出も可能です。これにより位置決め装置などが省力化出来ます。 (3つ爪チャック+2.5次元補正の例)
3次元位置補正取出し

平面上、高さ方向のみならずワークの傾きも3次元補正では位置検出が可能です。 (板金小物ワークの3次元補正の例)
3次元バラ積み取出し

従来困難とされてきたバラ積み状態からでも取出しが可能になりました。 既設ラインへの導入検討も、当社でFANUC製3次元補正カメラ及びロボットを使用して実製品でテストする事が出来ます。(有償)
VS-600
シーム溶接線検出装置(ラインセンサーカメラ方式) ラインセンサーカメラを使用して、ワーク側面のキズ検出や溶接線の検出を高速に検出しているシステムです。
VS-601

シーム溶接線検出装置(魚眼レンズカメラ方式) 魚眼レンズカメラを使用し、一回の撮像でシーム溶接線を検出します。 この画像処理技術を開発する事で大掛かりな設備改造を必要とせず、既存のラインでも導入が可能です。
VS-R200
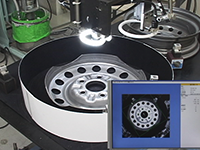
ホイールディスク位相検出装置 汎用の画像マッチングでは検出困難な位相検出を専用のアルゴリズムを開発して正確に検出しています。 その検出した位置データをロボットや次工程へ転送しさまざまな組立ラインに導入出来ます。